|

I am an undergraduate at Northwestern University, majoring in Computer Science at the McCormick School of Engineering. My research interests are robot learning, foundation models for robotics, and reinforcement learning. |
|
|
|
|

B.S. in Computer Science, McCormick School of Engineering
Sep 2025 – Jun 2029
Jan 2026 – Present
Jan 2026 – Present
Jan 2026 – Apr 2026
|
|
|

|
A follow-up to SENTINEL, a formal-verification framework built on OmniGibson and BEHAVIOR-1K for the safety of foundation-model-based embodied agents. |
|
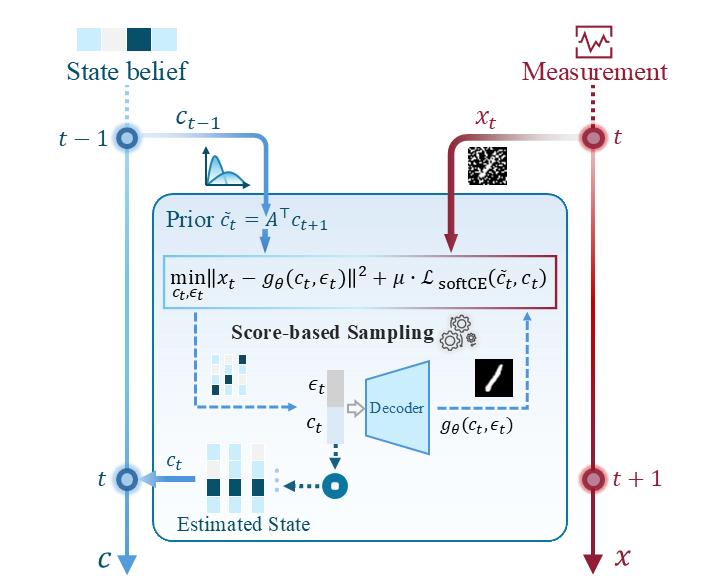
An online Generative Bayesian Filtering algorithm for laser powder-bed fusion (LPBF) defect monitoring that uses conditional VAEs as learned likelihoods. |
|
Open-source NVIDIA Isaac Lab framework for the LeRobot SO-101 arm that unifies PPO+Distillation, ACT, and Diffusion Policy training under a single CLI / Python API with a real-arm deployment bridge, backed by 80+ unit tests. A shared joint-position action space in LeRobot motor units lets one checkpoint play back in Isaac Sim and deploy on a Feetech follower with no sim-to-real conversion, alongside unified visual / observation / physics domain randomization across Lift, PickPlace, and Stack. |
|

|
A modular 8-package ROS 2 Humble autonomy stack for TurtleBot3 mobile manipulation in Gazebo, with custom messages and actions (DetectedObject, TaskStatus, PickPlace) coordinating the perception → navigation → manipulation loop through a central task-manager node. Integrates Nav2 with a pick-place action server plus rosbag2 recording and a success-rate eval pipeline, with pluggable manipulation backends ready for future MoveIt 2 and learned-policy (ACT / Diffusion) integration. |
|
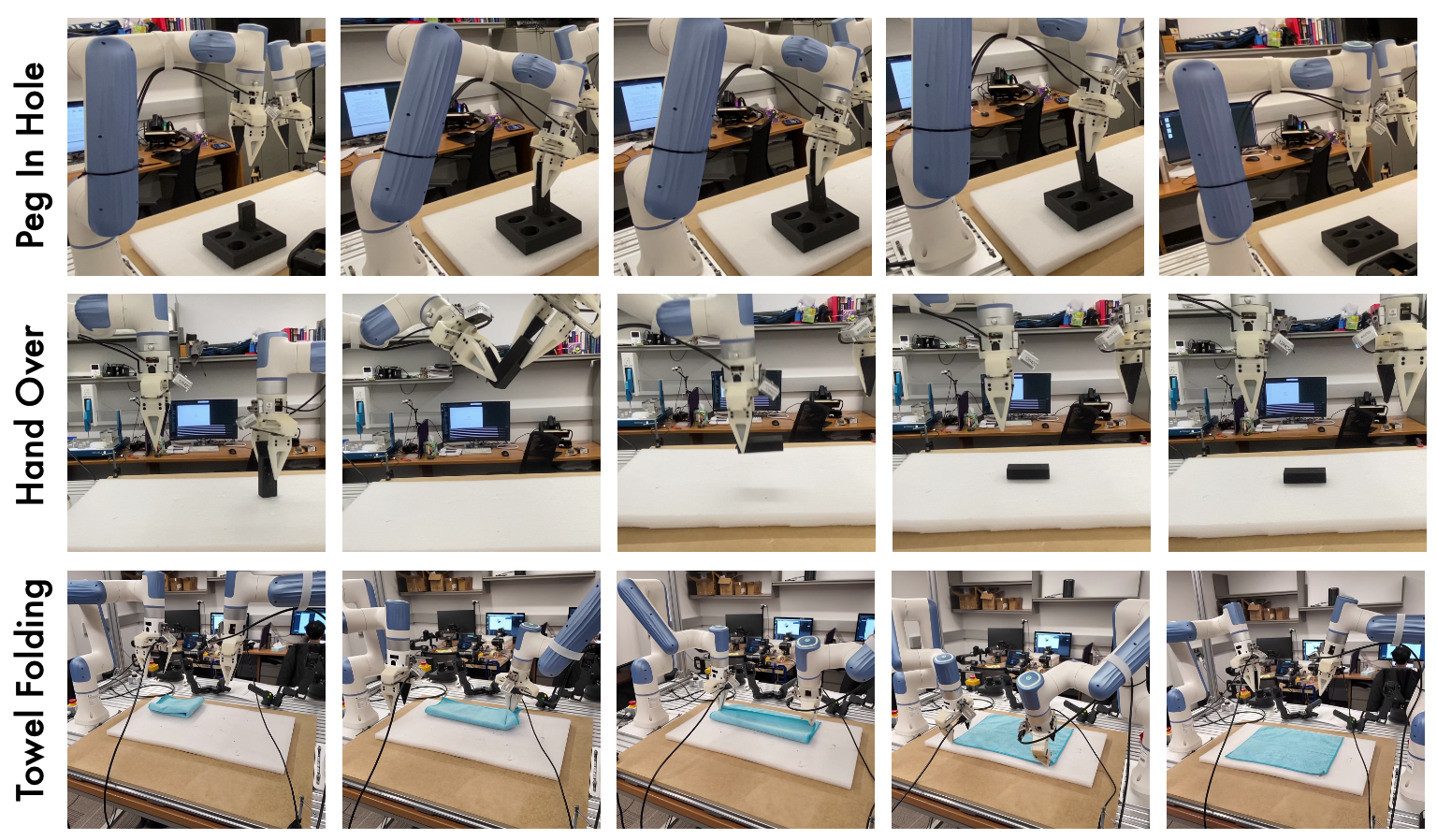
A controlled study of how hardware fidelity propagates through the imitation-learning pipeline — from teleoperation data collection to policy deployment — comparing DOBOT X-Trainer Nova2 and AgileX PiPER bimanual platforms on peg insertion, towel folding, and object handover. The benchmark measures per-platform teleop success under latency, precision, and motion-scaling differences and pairs 25 demonstrations per task with ACT and Diffusion Policy training to relate policy-performance gaps to upstream data quality. |
|
Automated pipeline that detects pores and keyholes in X-ray welding videos with Grounded SAM, then labels each frame by pore-generation type across four states and aggregates trajectories into a transition-probability matrix for downstream defect modeling. |
|
|
A 6-DOF hexapod platform with tripod and wave gaits driven by inverse kinematics and IMU-based PD feedback, paired with A* planning over a discretized occupancy grid and a subsumption-based reactive controller for real-time obstacle avoidance. Includes a frontier-based exploration pipeline that incrementally builds the map and prioritizes frontiers by information gain for autonomous coverage. |
|
|
A soccer player market-value prediction system with XGBoost and LightGBM ensembles trained on 30,000+ records and 31 engineered features, tuned via Optuna Bayesian search to reduce RMSE by 15%. Deployed as a Streamlit dashboard with 6 interactive analytics views. |
|
2026Northwestern Academic Year Undergraduate Research Grant
2026Northwestern Summer Undergraduate Research Grant
2025–26Dean’s List, Northwestern University
|
|
|